Tilda Publishing
прогРАММНОЕ ОБЕСПЕЧЕНИЕ
ДЛЯ СКАНИРУЮЩИХ УСТРОЙСТВ
(лС2ДСКАНЕР)
ДЛЯ СКАНИРУЮЩИХ УСТРОЙСТВ
(лС2ДСКАНЕР)
как Это работает?
Профиль

Размеры
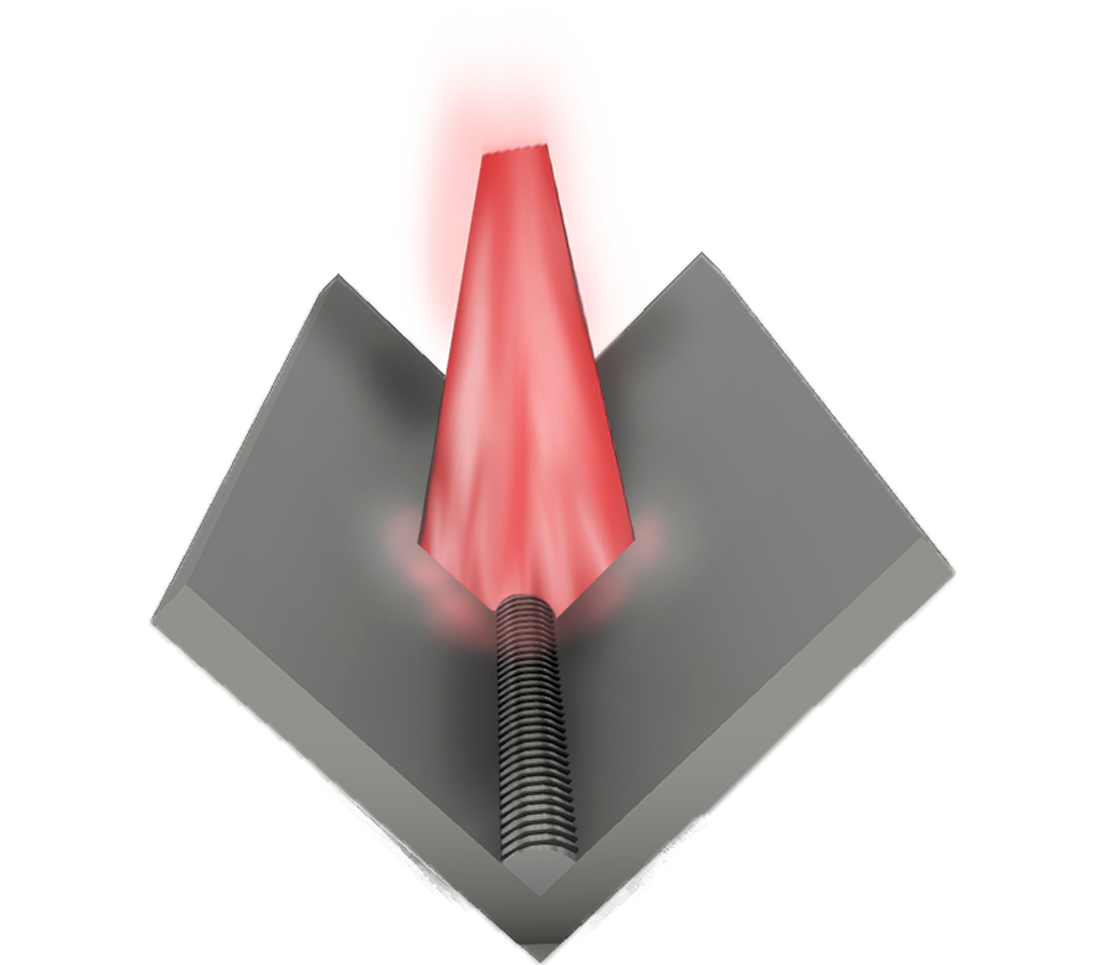
Контроль сварного шва
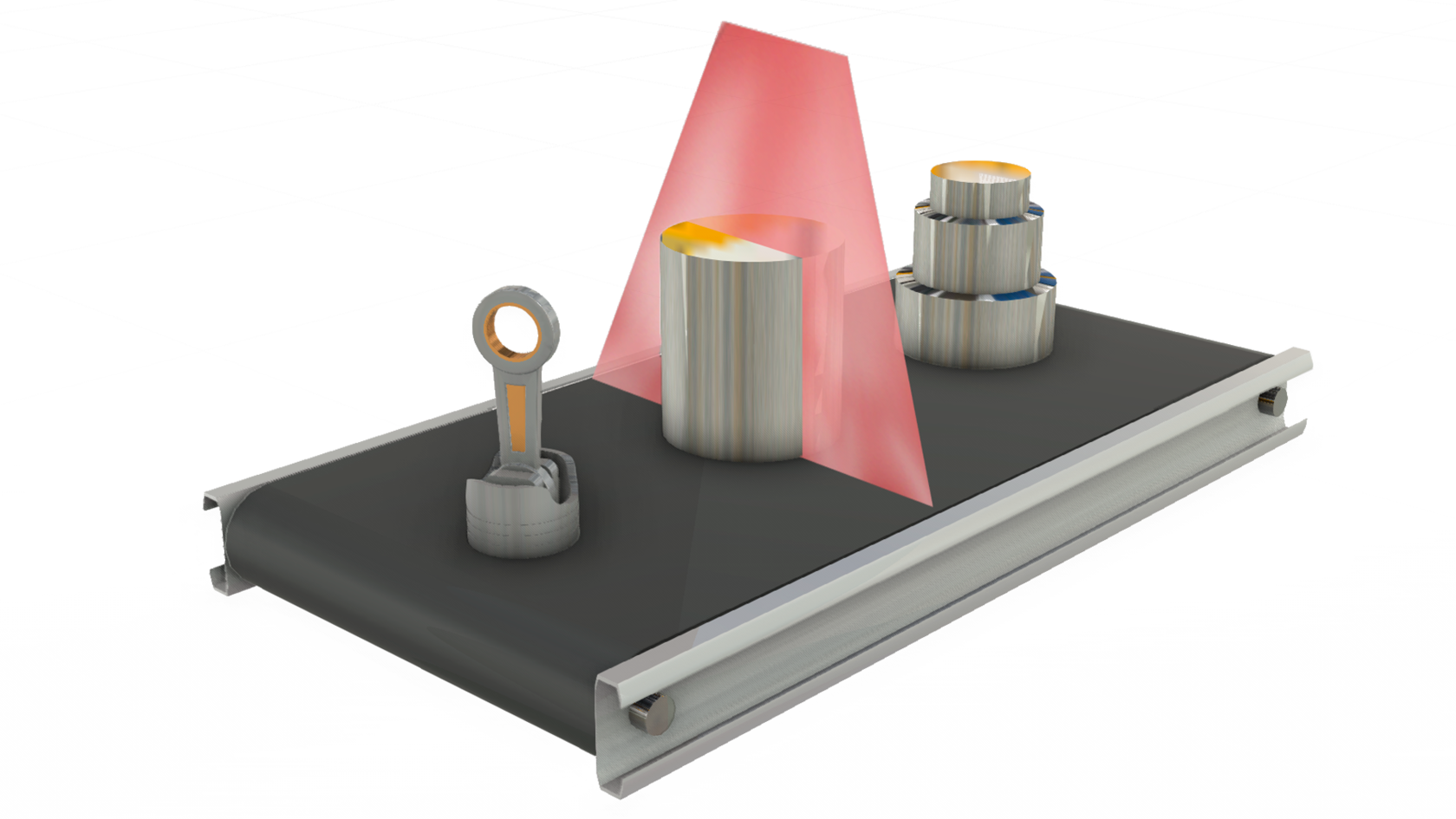
Распознавание
Примеры
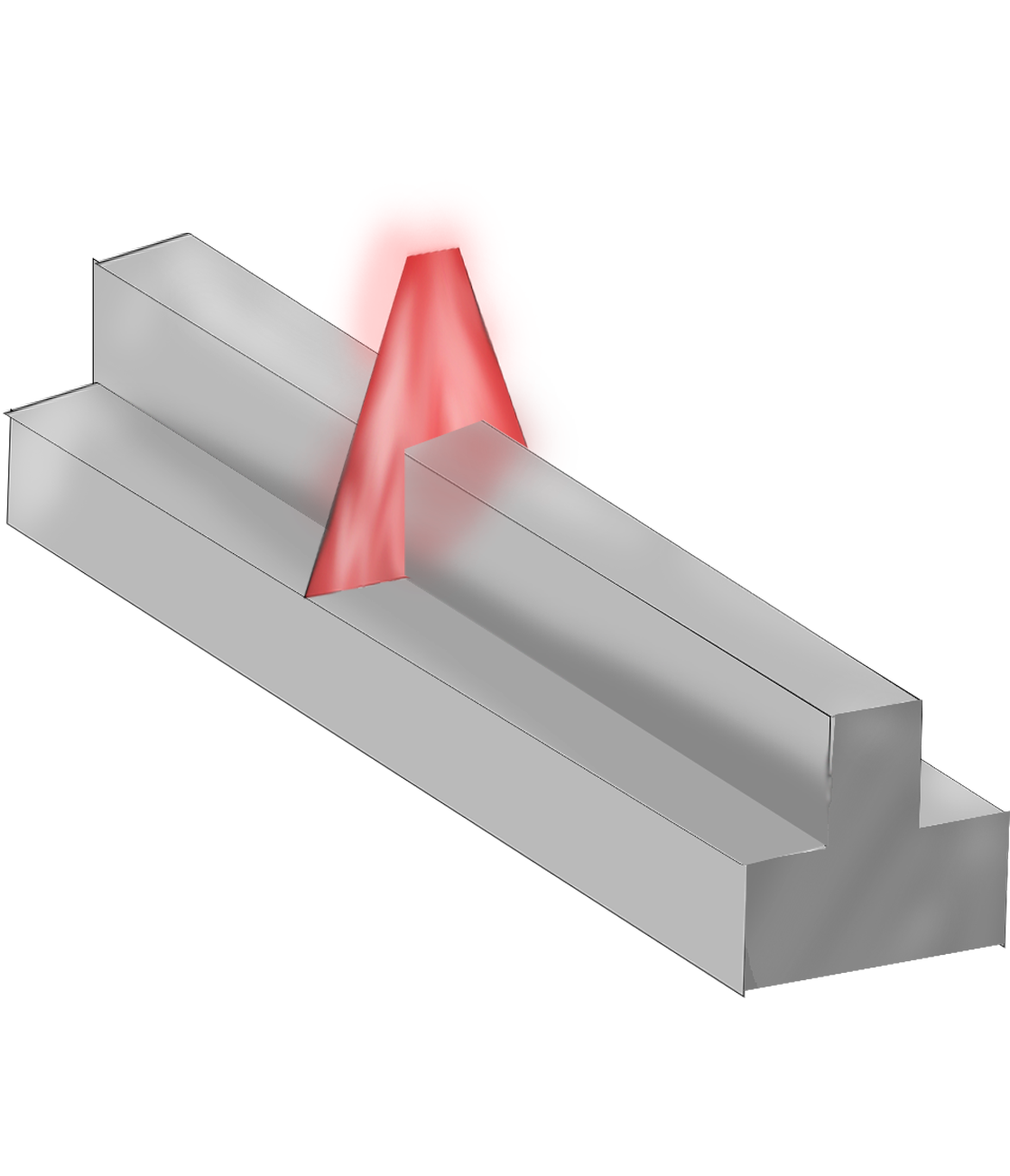
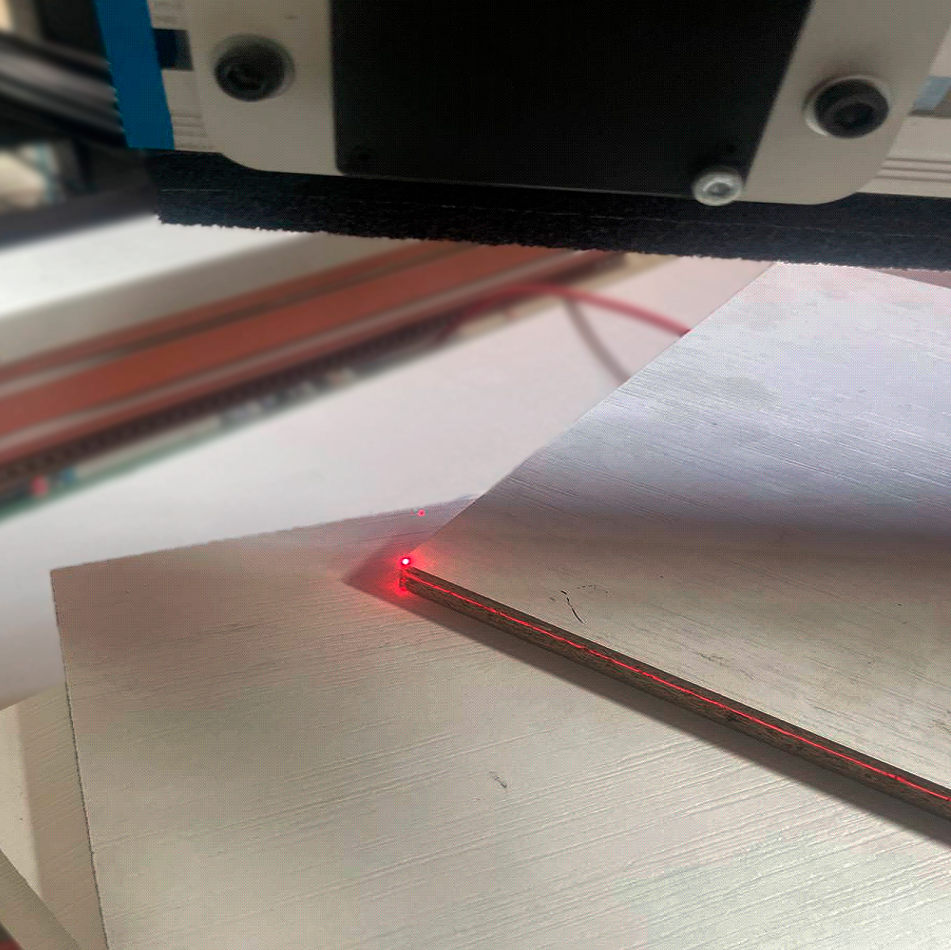
Излучённый лазером луч, развернутый в идеальную прямую линию, проецируется на поверхность контролируемого объекта.
Световая линия повторяет профиль объекта в сечении. Отраженное от объекта изображение световой линии посредством объектива проецируется на КМОП-фотоматрицу. По базе полученного изображения микропроцессор производит вычисление реальных координат световой линии.
Световая линия повторяет профиль объекта в сечении. Отраженное от объекта изображение световой линии посредством объектива проецируется на КМОП-фотоматрицу. По базе полученного изображения микропроцессор производит вычисление реальных координат световой линии.
Сканирование происходит почти мгновенно (0.008192 секунды), с погрешностью измерения точек на пористой поверхности до 0.2 мм(до обработки МНК). Производительность и качество изготовления изделий при внедрении данного решения становятся в разы выше, в сравнении с решением на базе пары дальномеров
Итог
Операционная система контроллера промышленного робота выполняет серверное приложение, обеспечивающее обмен данными между сканером и роботом.
- Клиент (ПО робота) отправляет запрос данных профиля серверу
- Сервер отправляет команду "замер профиля" Сканеру
- Сканер производит замер и отправляет данные Серверу
- Сервер обрабатывает полученные данные, сглаживая шум и векторизируя кривые
- Сервер отправляет Клиенту (ПО робота) чистые, готовые к применению данные
Этап 2

Этап 1
от 2 млн руб.
ЛС2ДСканер
ФАЙЛЫ
Функциональные характеристики
Программное
обеспечение
обеспечение
Руководство по эксплуатации
