Tilda Publishing
Техническое зрение
кликни →
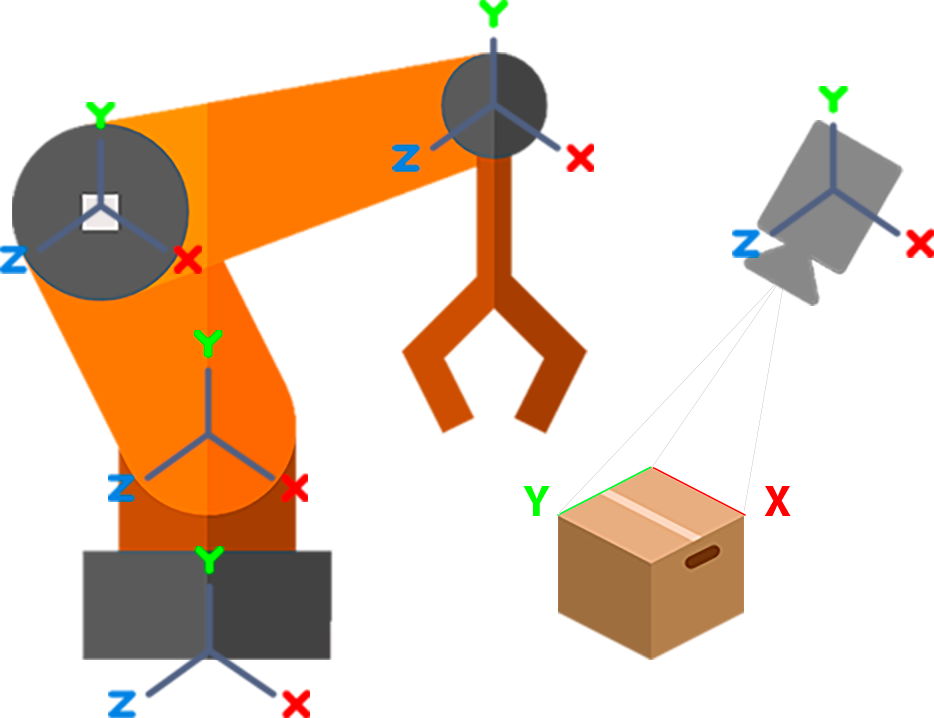
На рисунке стереосенсор установлен неподвижно над рабочей зоной. Для работы с координатами, нам нужно определиться с системами координат. Основание робота является началом отсчёта базовой системы координат (Xa, Ya, Za).
Облако точек объекта измеряется стереоскопической системой технического зрения (СТЗ) и определяются в собственной системе координат устройства (Xb, Yb, Zb).
Далее, используя полученную ранее методом взаимной калибровки матрицу преобразований, производится преобразование координат из системы координат камеры (Xb, Yb, Zb) в систему координат промышленного робота (Xa, Ya, Za)
Облако точек объекта измеряется стереоскопической системой технического зрения (СТЗ) и определяются в собственной системе координат устройства (Xb, Yb, Zb).
Далее, используя полученную ранее методом взаимной калибровки матрицу преобразований, производится преобразование координат из системы координат камеры (Xb, Yb, Zb) в систему координат промышленного робота (Xa, Ya, Za)
Камера, направленная на объект, захватывает изображение и
локализует местонахождение и геометрию объекта в кадре.
Учитывая калибровку взаимного расположения камеры и промышленного робота, полученные координаты преобразуются в систему координат робота и передаются посредством промышленной полевой шины в контроллер робота.
Далее, используя полученные данные, робот будет выполнять запрограмированные действия строго в соответствии с расположением и геометрий заготовки.
С помощью данной технологии можно оптимизировать такие процессы, где требуется использовать навык человека искать и определять искомый объект на плоской поверхности для совершения с ним дальнейших технических операций
локализует местонахождение и геометрию объекта в кадре.
Учитывая калибровку взаимного расположения камеры и промышленного робота, полученные координаты преобразуются в систему координат робота и передаются посредством промышленной полевой шины в контроллер робота.
Далее, используя полученные данные, робот будет выполнять запрограмированные действия строго в соответствии с расположением и геометрий заготовки.
С помощью данной технологии можно оптимизировать такие процессы, где требуется использовать навык человека искать и определять искомый объект на плоской поверхности для совершения с ним дальнейших технических операций
Визуальное распознавание
Генераторы линии подсветки проецируют на поле зрения видеосенсора СТЗ лазерные лучи . На основе информации от видеосенсора, с учетом взаимного расположения устройств происходит вычисление трехмерных координат облака точек сканируемого изделия.
Триангуляционный метод измерения основан на расчете расстояния до объекта через соотношения треугольников.
Подбор фотосенсора, объектива, проектора и их взаимного расположения происходит индивидуально для каждого отдельно взятого случая, иногда необходимо добиться метрологической точности, иногда - широкого поля зрения, иногда и того, и другого
Триангуляционный метод измерения основан на расчете расстояния до объекта через соотношения треугольников.
Подбор фотосенсора, объектива, проектора и их взаимного расположения происходит индивидуально для каждого отдельно взятого случая, иногда необходимо добиться метрологической точности, иногда - широкого поля зрения, иногда и того, и другого
Триангуляционный метод
Примеры
Сортировка
Высокая скорость в сочетании с непревзойденной точностью позволяют техническому зрению оставаться одним из самых
эффективных решений для сортировки продукции,
а в совокупности с достигаемой гибкостью переналадки - самым удобным в эксплуатации
эффективных решений для сортировки продукции,
а в совокупности с достигаемой гибкостью переналадки - самым удобным в эксплуатации
Техническое зрение может облегчить и ускорить работу не только робота, но и человека ведь не нужно более класть заготовку в специально спроектированную под каждую отдельную заготовку дорогостоящую оснастку, нужна всего лишь камера, робот и хороший свет
Определение положения
Контроль шва
позволяет искоренить дефекты сварочного шва вашего изделия, данная технология даёт промышленному роботу возможность распознавать неровности и дефекты стыка для корректировки параметров сварки в режиме реального зрения с целью достижения оптимальных характеристик сварного шва

Заполните форму с указанием интересующего ПО и полным описанием потребностей
С Вами свяжется наш сотрудник для уточнения деталей
Вам будет отправлено техническое предложение
Наши контакты
Расскажите нашему ведущему IT-специалисту задачи, которые стоят перед Вами, мы подготовим самые эффективные пути решения
+7 (965) 930-29-29
info@it-iris.com
info@it-iris.com
